I miraculously got into Intangible Interaction last Wednesday, after a whole week of checking every single day and the waitlist not even opening up. So it's been quite a game of catch-up, but thanks to both Yeseul and my project partner Luhan I think I'm caught up!
Assignment partner: Luhan Rong
Our assignment was to look at two sensors:
- IR Breakbeam sensor
- IR Time of Flight sensor (VL51L0X, since the VL6180X we were assigned didn't arrive in time)
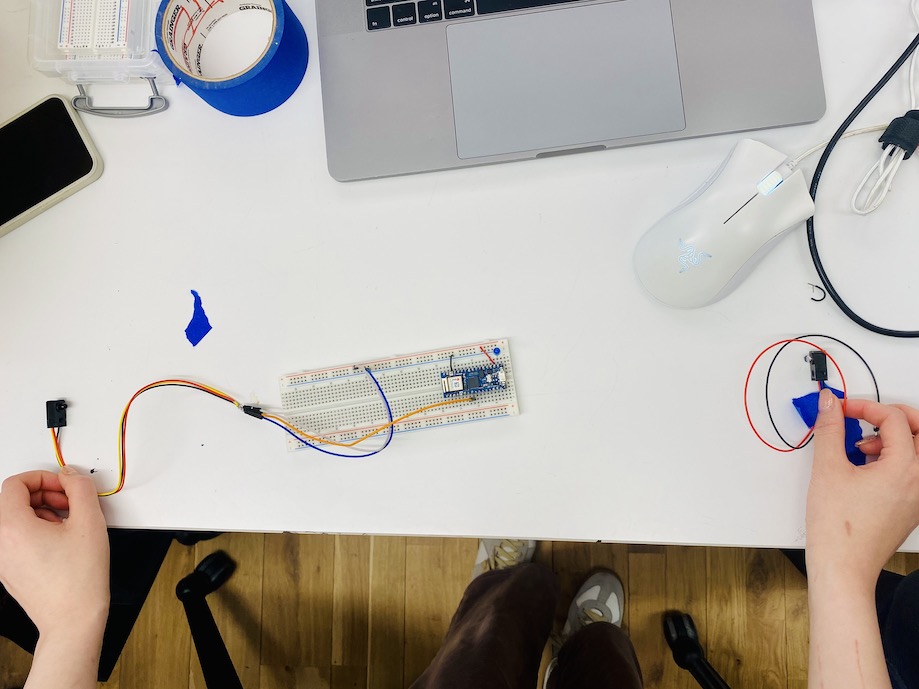
IR Breakbeam
Sensor with two parts: one that only needs power (and ground) and sends a beam, and another that receives the beam and is connected to the Arduino as an input (as well as power and ground).
Observations
- Object must be opaque for breakage to be detected. If the object is translucent, not break is detected.
- Works even if the two sides are offset from each other by a few degrees (middle video). The further away the two parts are from each other, the smaller this angle becomes.
- Guessing sender is a straight beam, and the receiver has an angled field of vision.
- According to datasheet, the angle is <10°.
- The datasheet writes max distance 50cm, and indeed around that distance the sensor was more sensitive to alignment changes and would detect breakage more easily (right photo).
IR Time of Flight
Sensor that works by sending photons and measuring the time for the photons to hit an object and bounce back. This particular model (VL51L0X) was an I2C device so we needed to connect its SCL, SDA, power, and ground.
It's biggest advantage is that it doesn't care about color, transparency, reflectiveness, etc.
Observations
- Readings very accurate when object is close (we compared it to a ruler xD, left video above). It does get much noisier when the object is further away, and the max distance depends on how much ambient light there is (more on this below).
- Field of vision very small angle when object is close (middle video above) and bigger when further (right video above).
- Works on transparent object (left video below), since photon is reflecting off of object (but conversely, irregular surface is harder).
- When searching for sensor drawbacks we found this article that mentioned the sensor being very sensitive to ambient light.
- Indeed under the bright lights we were only getting accurate readings up until ~35cm even though the technical spec mentions a max of 100cm.
- When we brought it under the table (middle video below), the measurement went up to ~60cm (could be more but there was a table in the way xD)
- In a dark room (right video below) the measurement show up to 100cm just like the specs mentioned.